Playmaker
SensorToolkit includes a number of custom Playmaker actions that make it convenient to use in your FSMs. The actions are all under the SensorToolkit category in the actions list. They're listed here roughly ordered by how often you'll need them.
Generic Sensor Actions
Sensor Get Detections
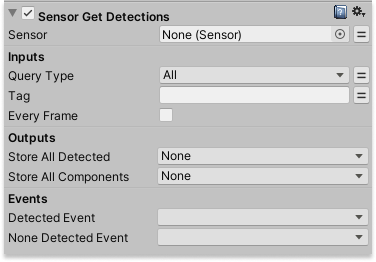
Queries the sensor for the GameObjects it detects. There's a handful of query types including: 'All' to get all detected objects and 'Nearest' to get only the nearest detected object by distance. The query can be fine-tuned to return objects with specific tags, or objects that have specific components.
Sensor Get Signal
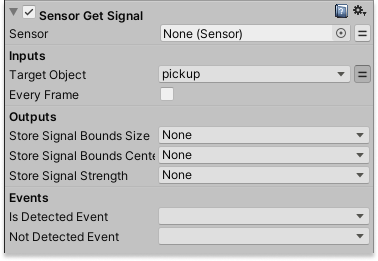
Retrieve the Signal data for a GameObject. This will give you the objects visibility (Signal Strength) and it's center point. Use this also if you want to check if a GameObject is currently detected or not.
Sensor Listen Detection Events
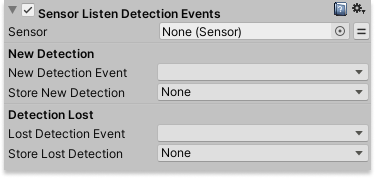
Subscribe to a sensors OnDetection, OnLostDetection events.
Sensor Pulse

Manually pulses the sensor.
Sensor Configure Pulse Routine
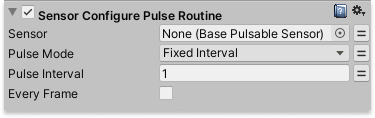
Configure how often a sensor should pulse.
Raycasting Sensor Actions
Sensor Get Detection Ray Hit
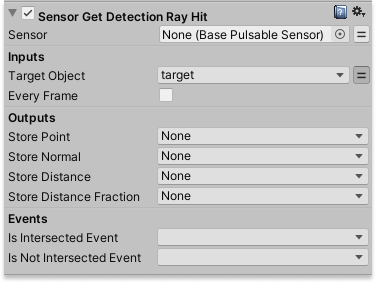
For a valid raycasting sensor this will retrieve the ray intersection details for a detected object. Works with the Ray Sensor, Arc Sensor and their 2D analogues.
Sensor Get Obstruction Ray Hit
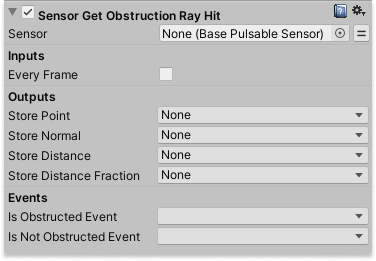
For a valid raycasting sensor this will retrieve the ray intersection details where it's obstructed. Works with the Ray Sensor, Arc Sensor, NavMesh Sensor and their 2D analogues.
Line of Sight Sensor Actions
Sensor Get Line Of Sight Result
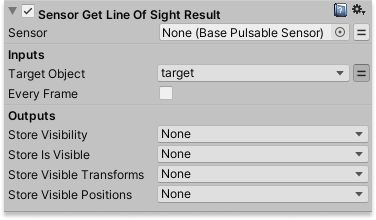
For a LOS Sensor this will give more detailed results from the line-of-sight test performed on an object. You will rarely need this action. To know an objects visibility it's better to use the 'Sensor Get Signal' action and use the 'Store Strength' output.
Steering Sensor Actions
Steering Sensor Seek
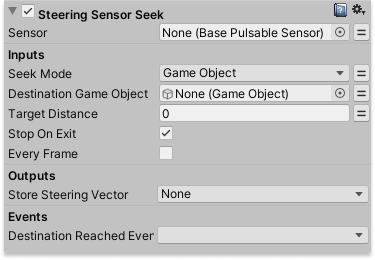
Sets the target position to be seeked by the Steering Sensor. When the Target Distance is set to a large number it behaves like a Flee behaviour. If the built-in locomotion is enabled the sensor will start moving to the target. Otherwise you can store the steering vector and move towards it with your own locomotion system.
Steering Sensor Configure
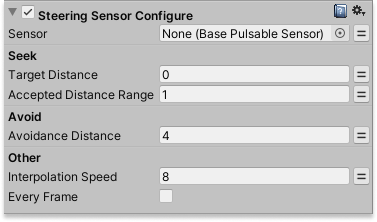
Exposes some configuration settings on the Steering Sensor that control its behaviour.
Steering Sensor Strafe
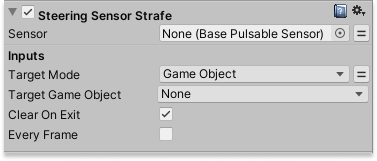
If the Steering Sensor has built-in locomotion enabled this will control the strafing behaviour. The target is a direction or GameObject the agent should face while it seeks it's destination.
Other Actions
Set FOV Collider
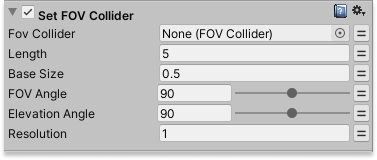
Generate a new collider shape based off the new parameters. This rebuilds the collider's Mesh so it's recommended not to call it each frame.